
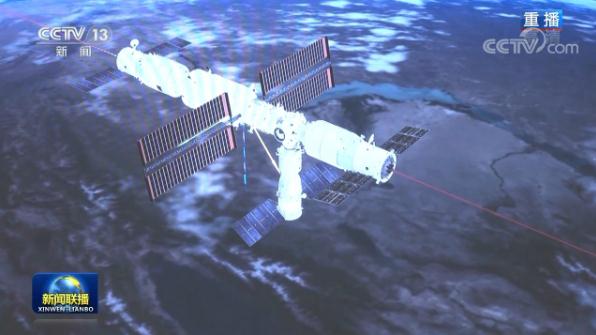
5时56分,天舟二号货运飞船在主操作手航天员叶光富的控制下,缓缓从核心舱节点舱前向端口分离。航天员翟志刚和王亚平密切观察天舟二号状态,按照操作流程配合操作。6时12分,航天员通过手控遥操作方式,控制天舟二号货运飞船撤离至距核心舱200米预定停泊点。
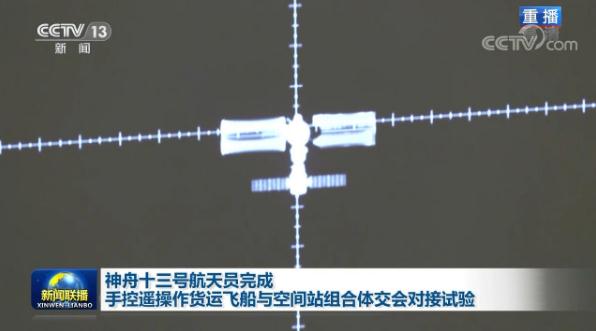
短暂停泊后,航天员在空间站内通过空空链路的传输,接收天舟二号状态图像信息,并手动控制天舟二号向核心舱平移靠拢。
7时35分,在三名航天员的精准控制下,天舟二号货运飞船对接于空间站组合体前向端口。手控遥操作交会对接作为空间站与来访飞行器交会对接的重要模式,是无人来访飞行器自动交会对接的备份手段。




